追蹤了博主三年了,在此用一個開源模板匹配算法回饋給各位 #183
Comments
|
你好,跑了一下,效果还可以;那么请问检测速度和精度怎么样?谢谢 |
|
测试了一下,检测速度有点难达到工业要求。精度尚不知。 |
|
@wly2020-robot |
|
你好,测试图目前全部来自你的实例图。 |
|
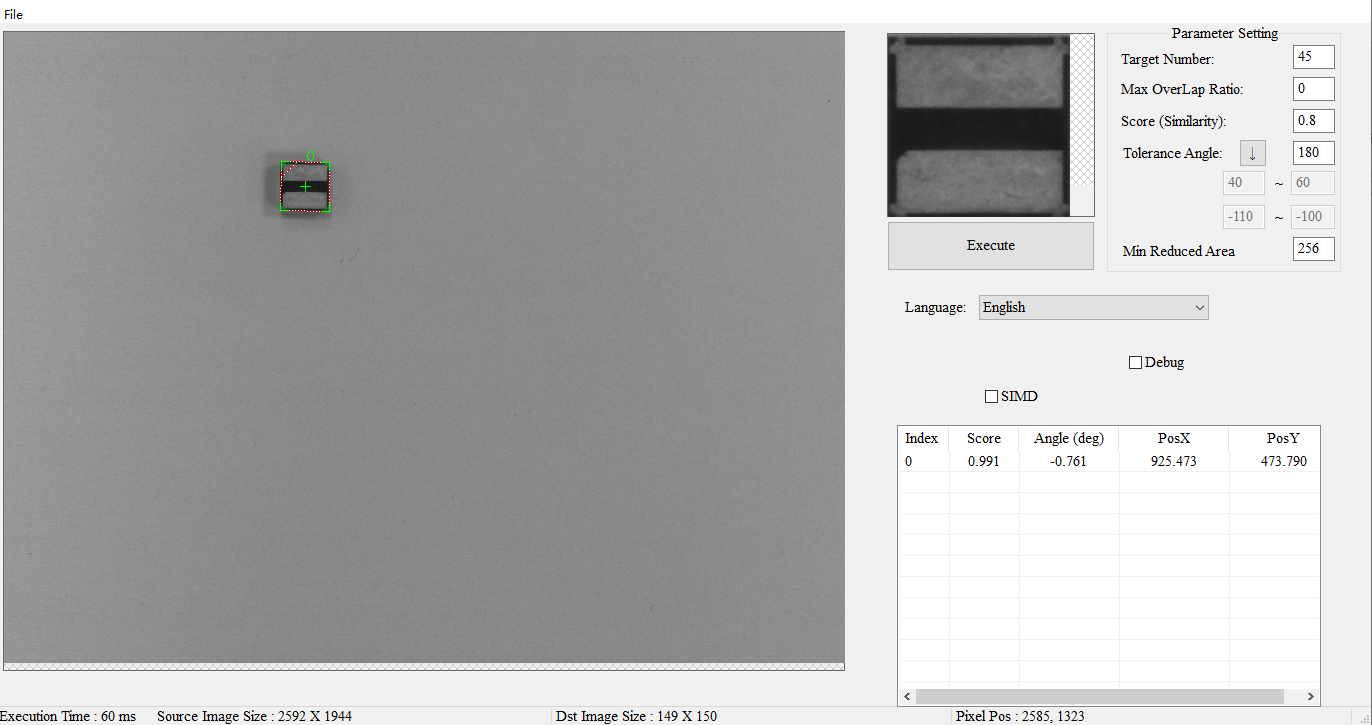
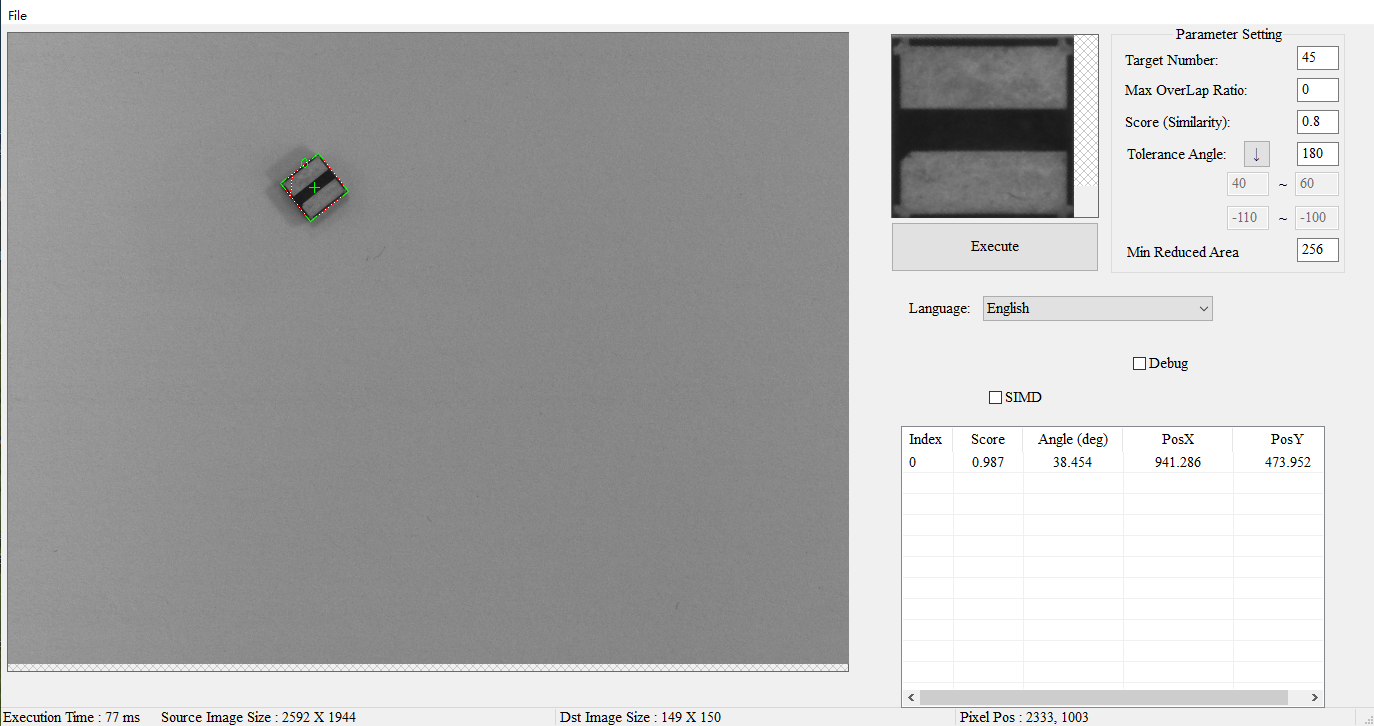
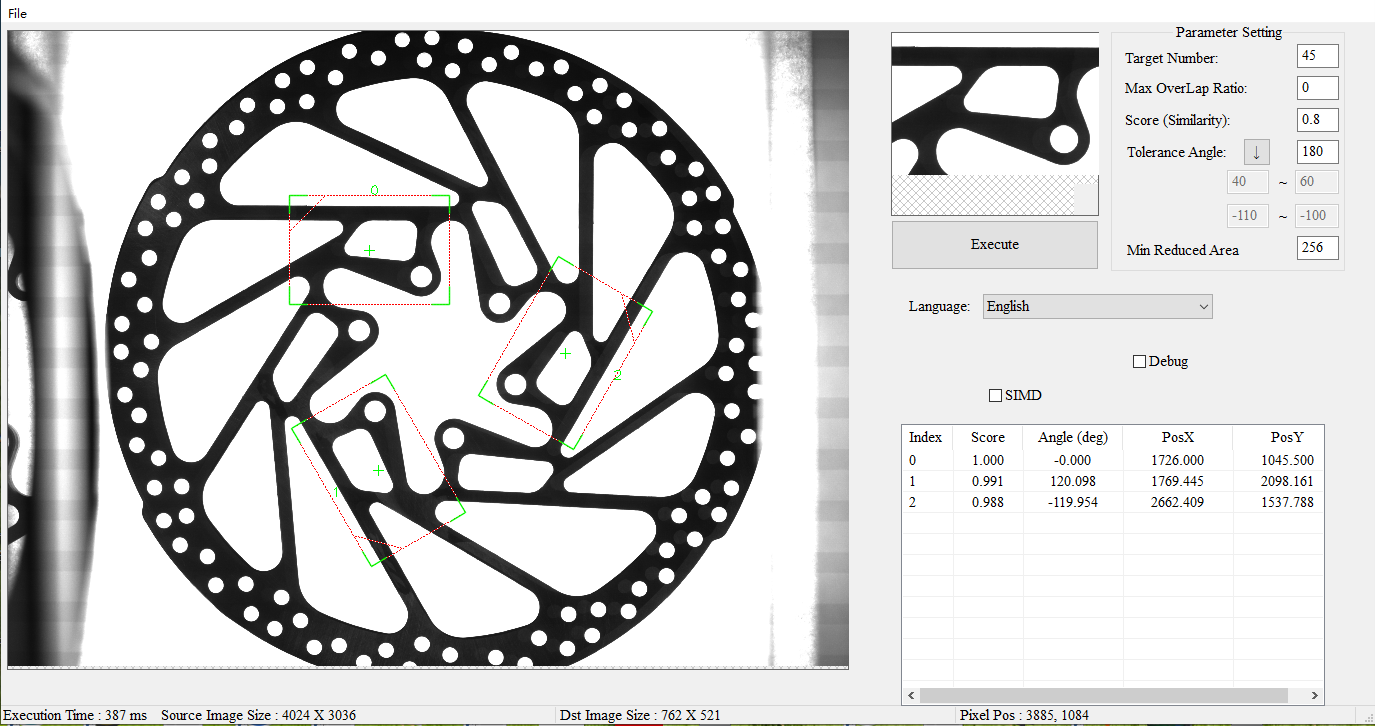
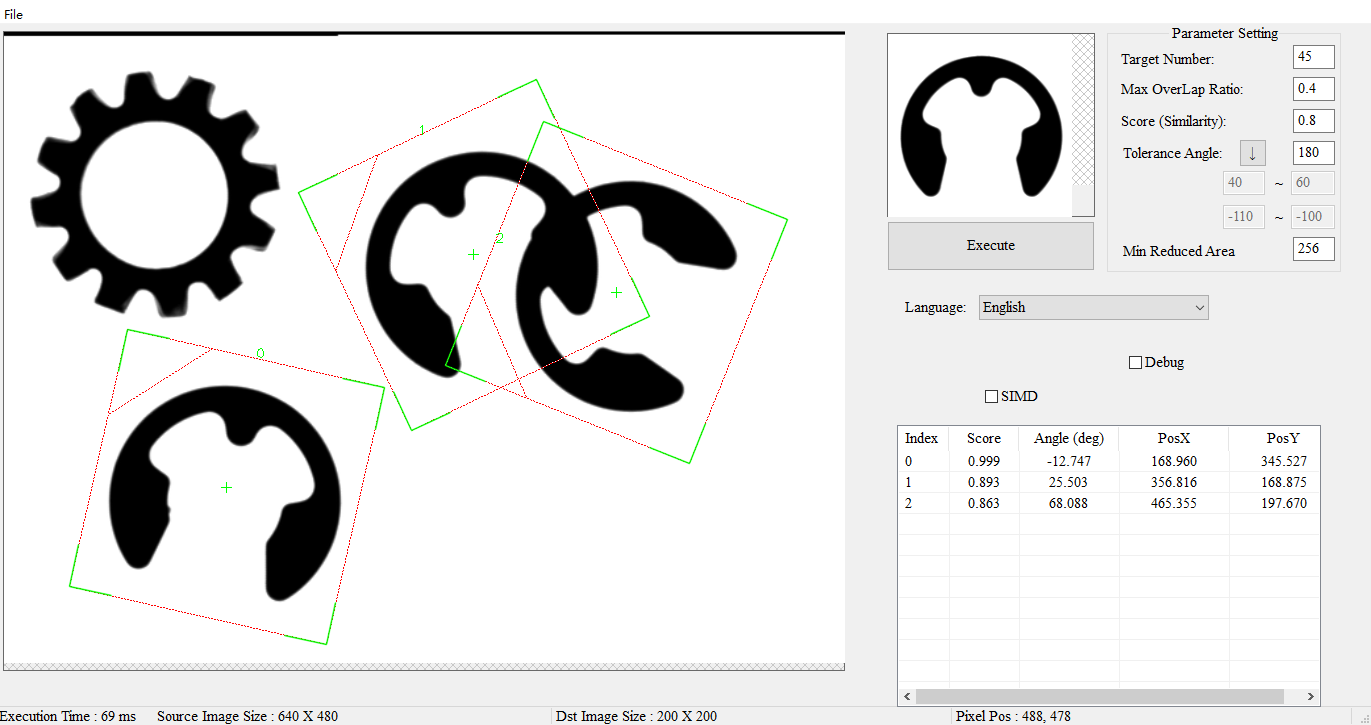
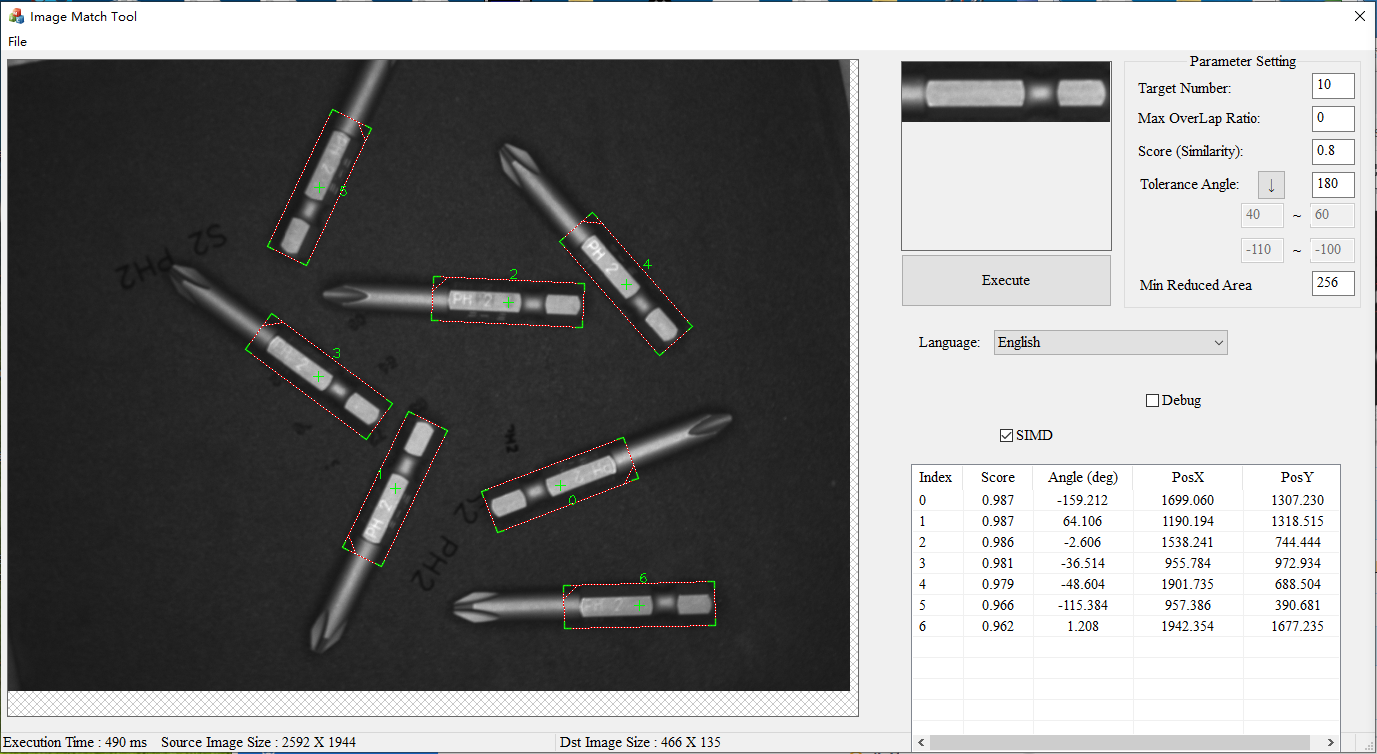
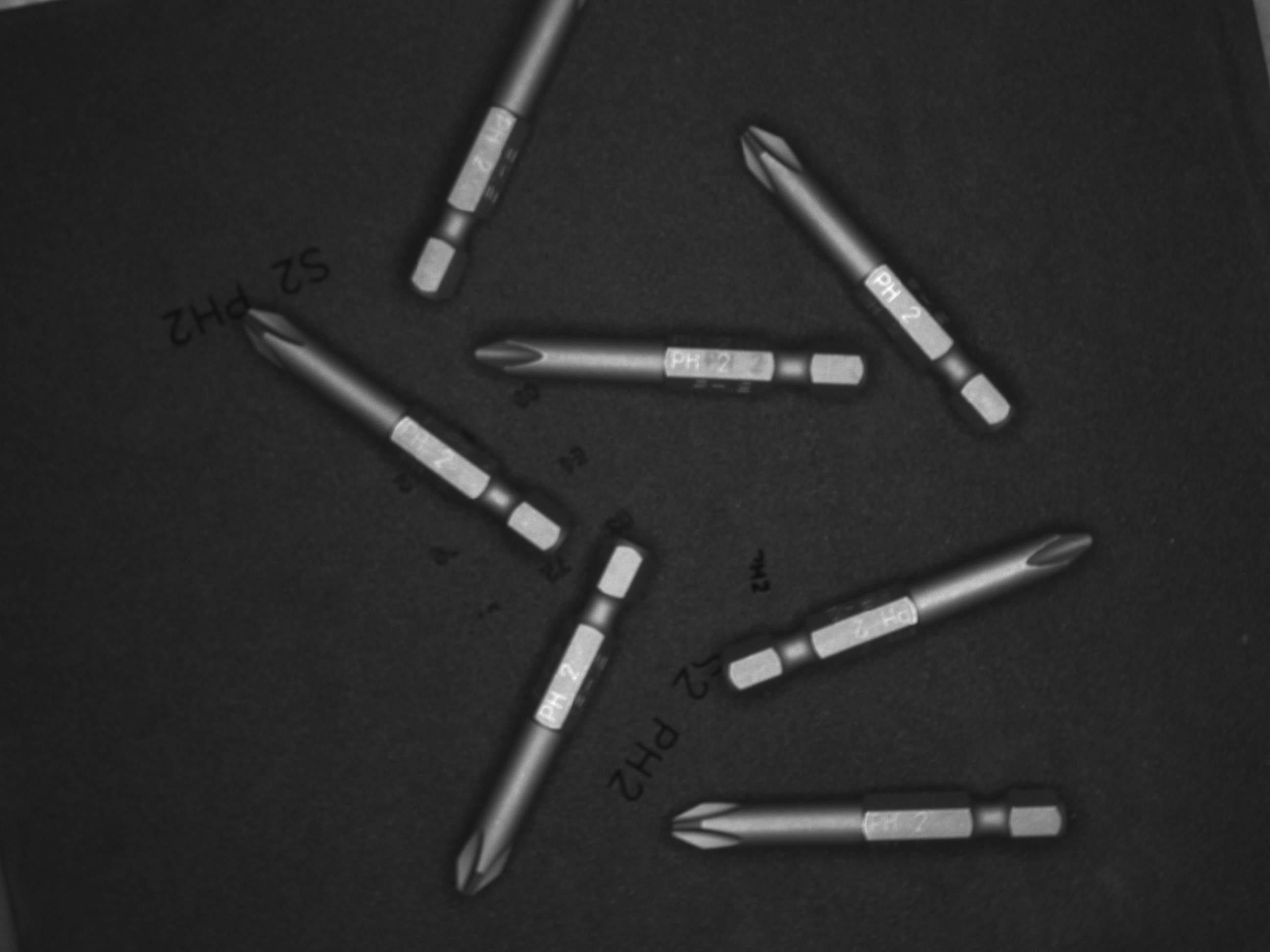
首先说一下角度检测,采用你的测试用例图;比如实际上是0度,用你的算法检测出来是-0.761;实际上是45度,实际检测出来的是38.454;检测效果图如下: |
|
|
|
偏差很大,是不是我哪里操作不对? |
|
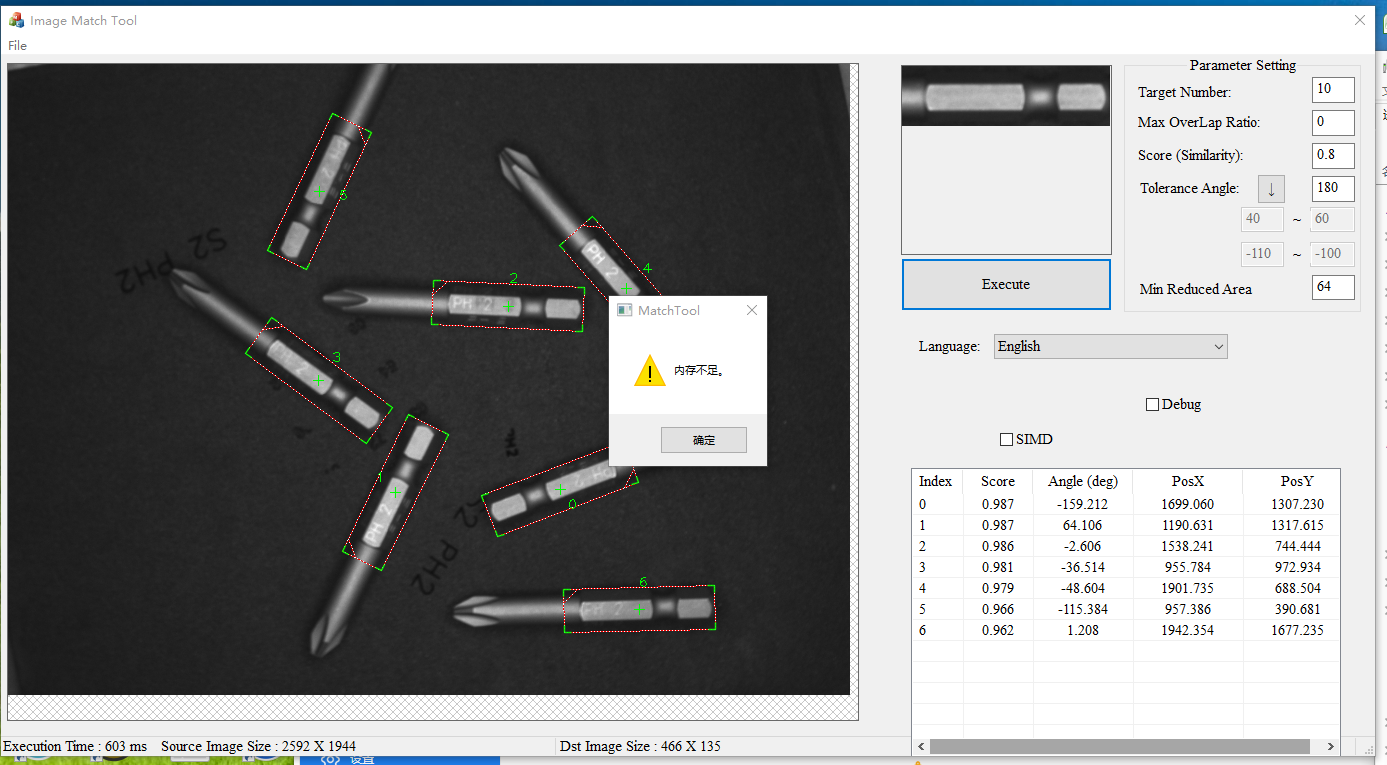
在说说检测速度:上效果图 |
|
我的电脑主要配置如下图: |
|
检测速度会去到600多ms,像素级别也就是1000万多一点,还是慢了点。 |
|
我实际用的arm嵌入式板,相比电脑配置检测速度就要慢3-4倍。 |
|
实际上工业上检测对检测速度和精度要求是高的。你这个算法就测试来看,与博主大佬的算法差距还是有的。也有可能我有些方面没有考虑到,或者没有优化到,请指教?谢谢。 |
|
1.38度那張圖實際就是38度... 我只是隨手擺放了一下就取名"45"了 |
|
嗯,38度那张图,那实际检测出来的角度38.454,偏差0.454度;0度那张图实际检测出来的角度是-0.761度,偏差0.761度;实际工业上定位检测,角度偏差在0.1度左右,甚至更小;能有优化的空间吗? |
|
|
|
把Min Reduced Area改成64,内存使用直接飙到6个G,直接卡死。 |
|
需要很大内存吗? |
|
|
|
1.隨手擺的不是真0度,不存在你說的誤差問題... 角度精度絕對是>0.1
|
|
你好,首先对你的解答很是感谢;已经把star给到你了。 |
|
|
|
同时能否给出算法的检测角度偏差范围呢?就像meiqua一样给出具体的精度数据,谢谢。 |
|
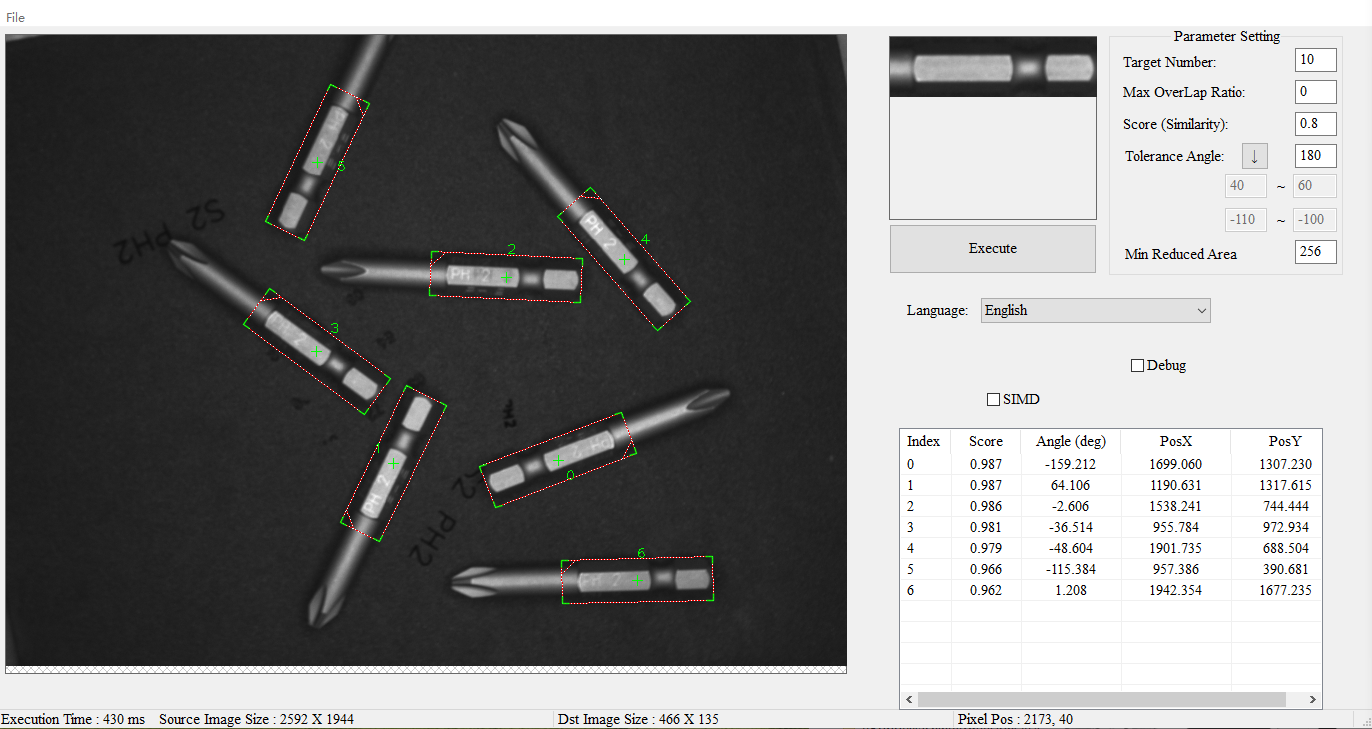
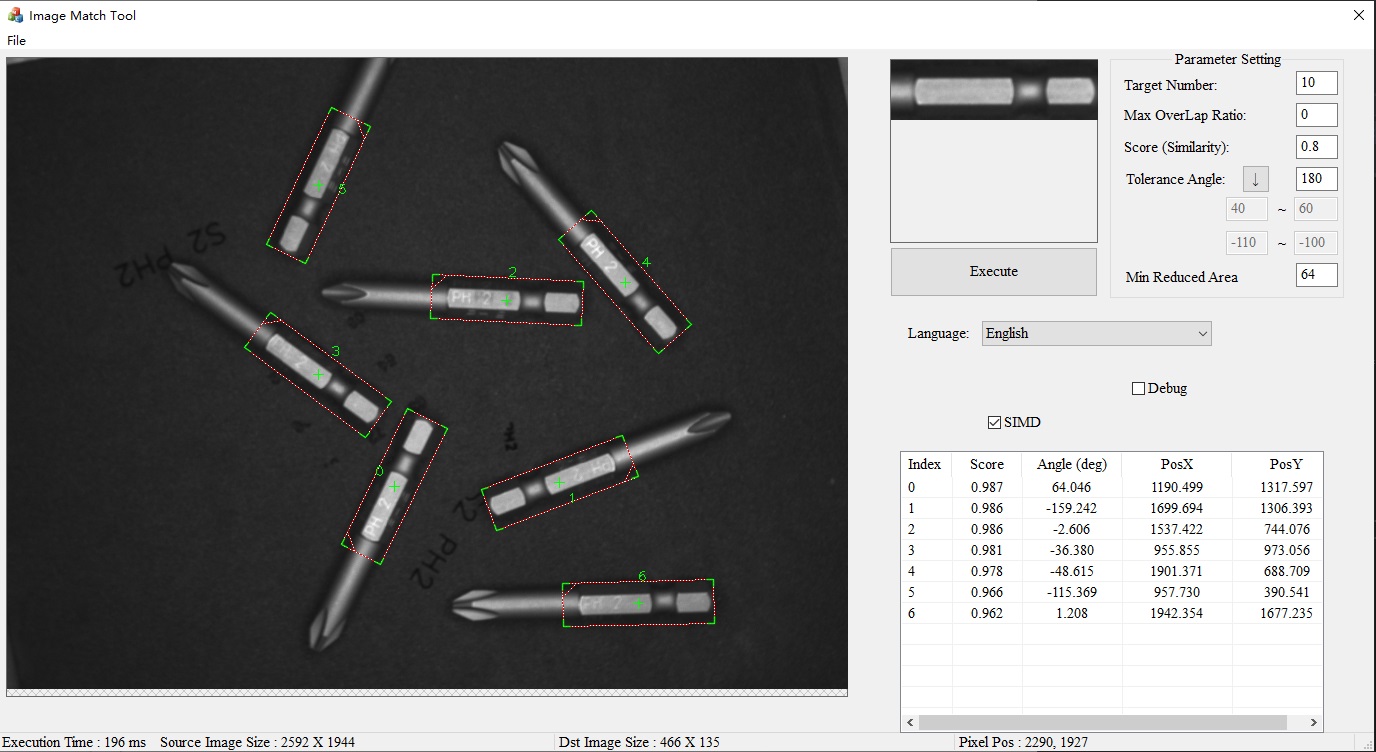
配置: i7-10700, 16GB內存, win10專業版 耗時170ms左右,你再同步下最新的代碼,此SIMD捲積在金字塔頂層不適用,我已經修改掉了 |
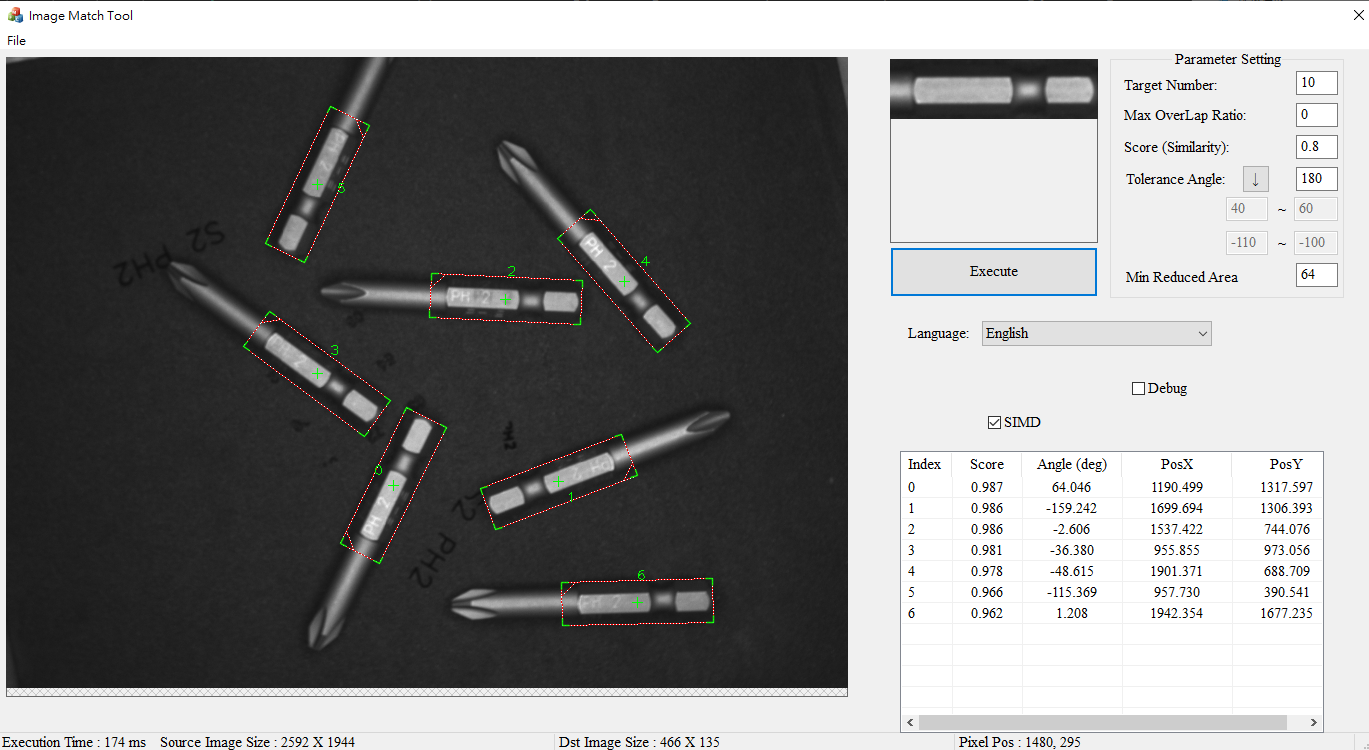
改完Min Reduced Area,要重新拖曳樣板圖片,不然會出現無法預期的情況 |
|
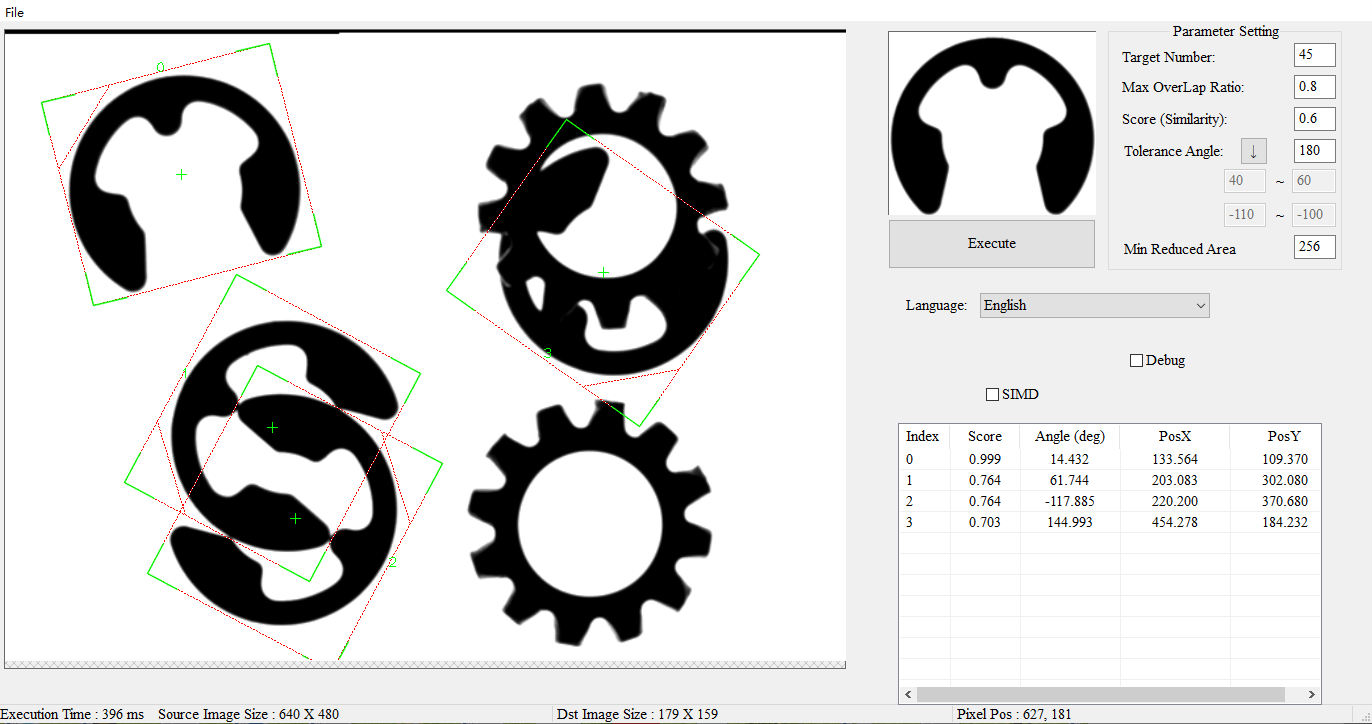
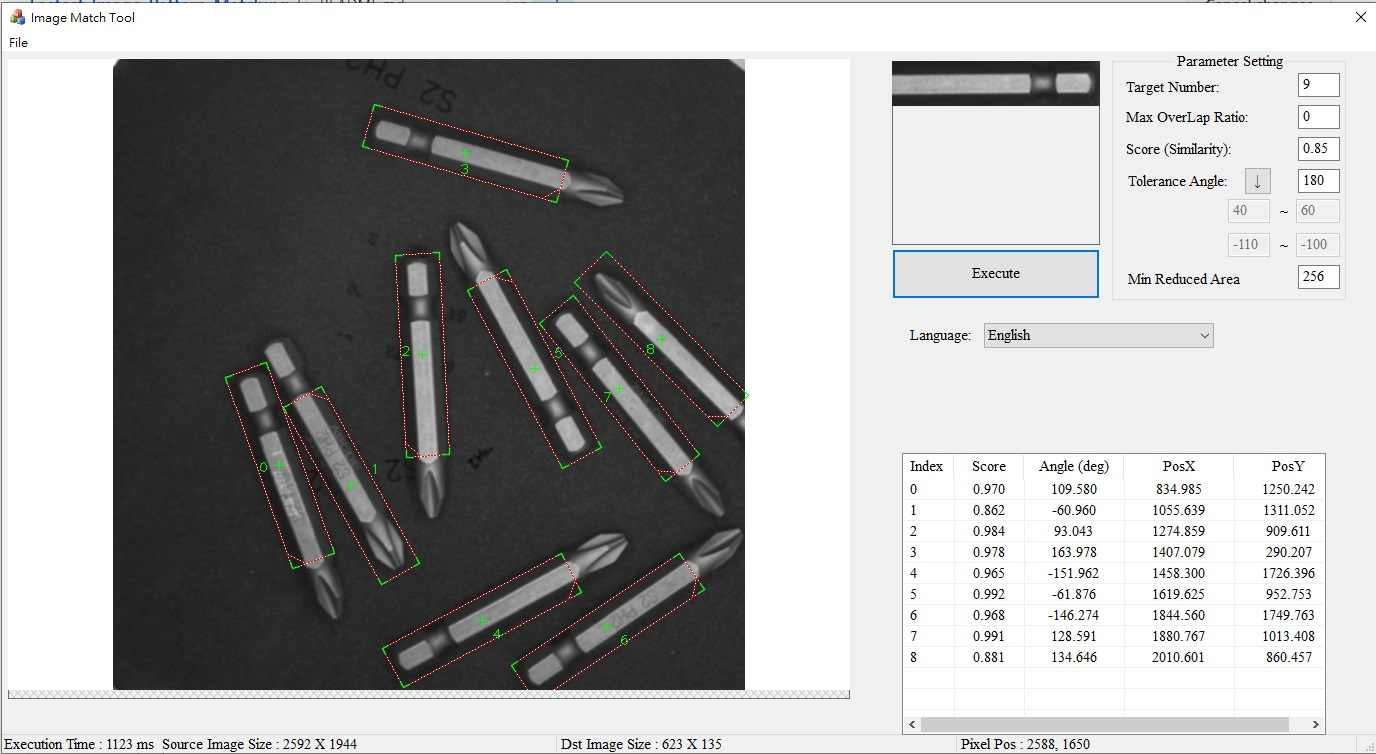
是的,我的配置要比你的低一点,检测下来大概190ms左右,还是觉得慢,工业上的工控电脑性能都比较弱,检测速度难以满足要求,有没有优化空间?效果图如下 |
|
对于目标的角度检测精度是>0.2吗?我在arm的6核心处理器上跑出来的效果去到1340ms左右,如果能跑出200-300ms基本上就满足速度要求了。如果在ubuntu系统上跑,有没有相应的版本或者是替换SIMD的版本参考呢?谢谢 |
|
SIMD我不會了 |
在哪,我这边链接都打不开搜不到了 |
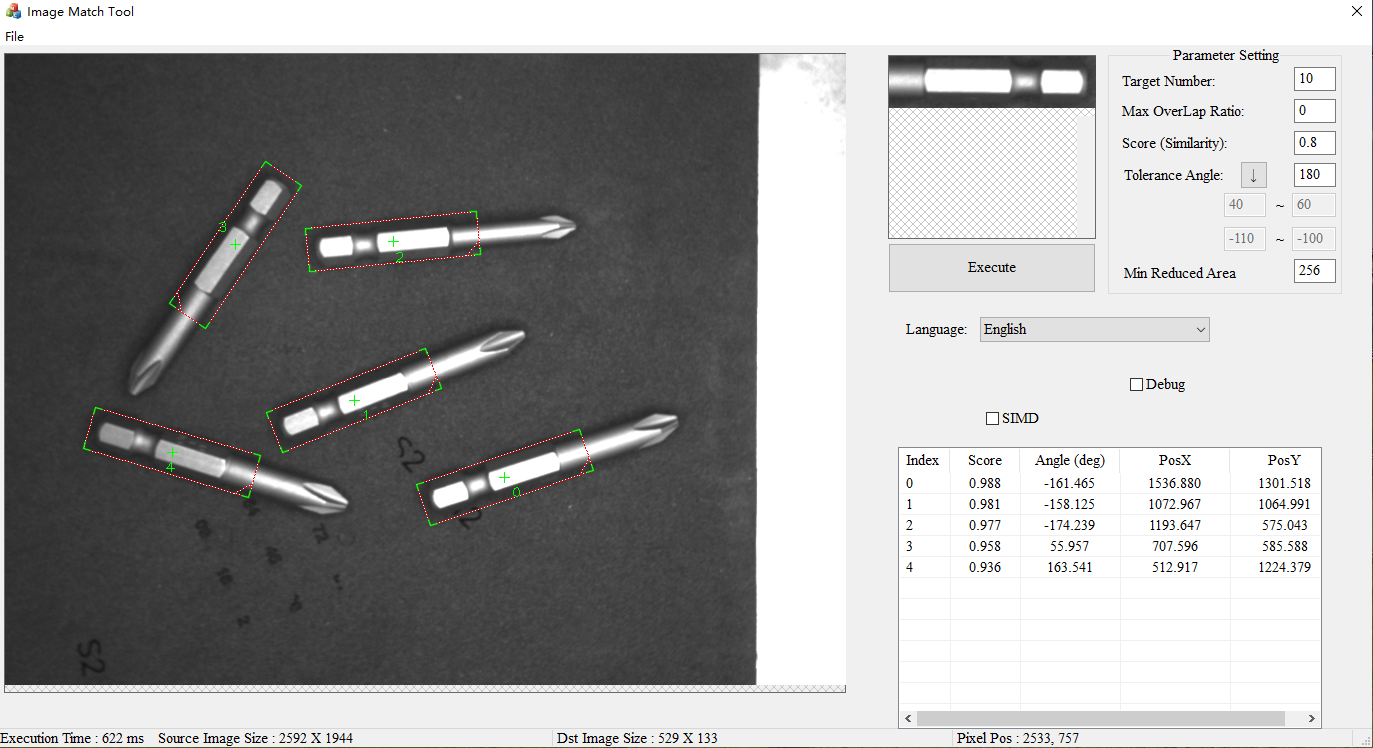
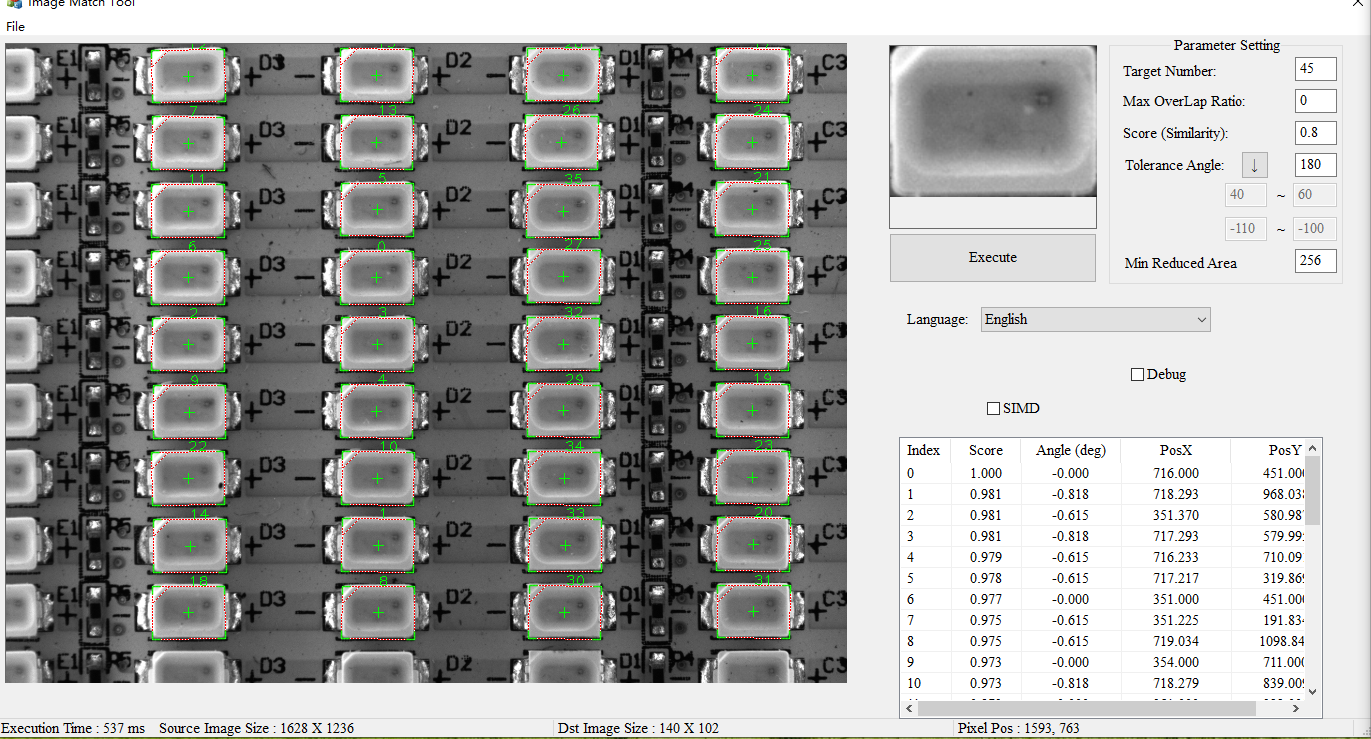
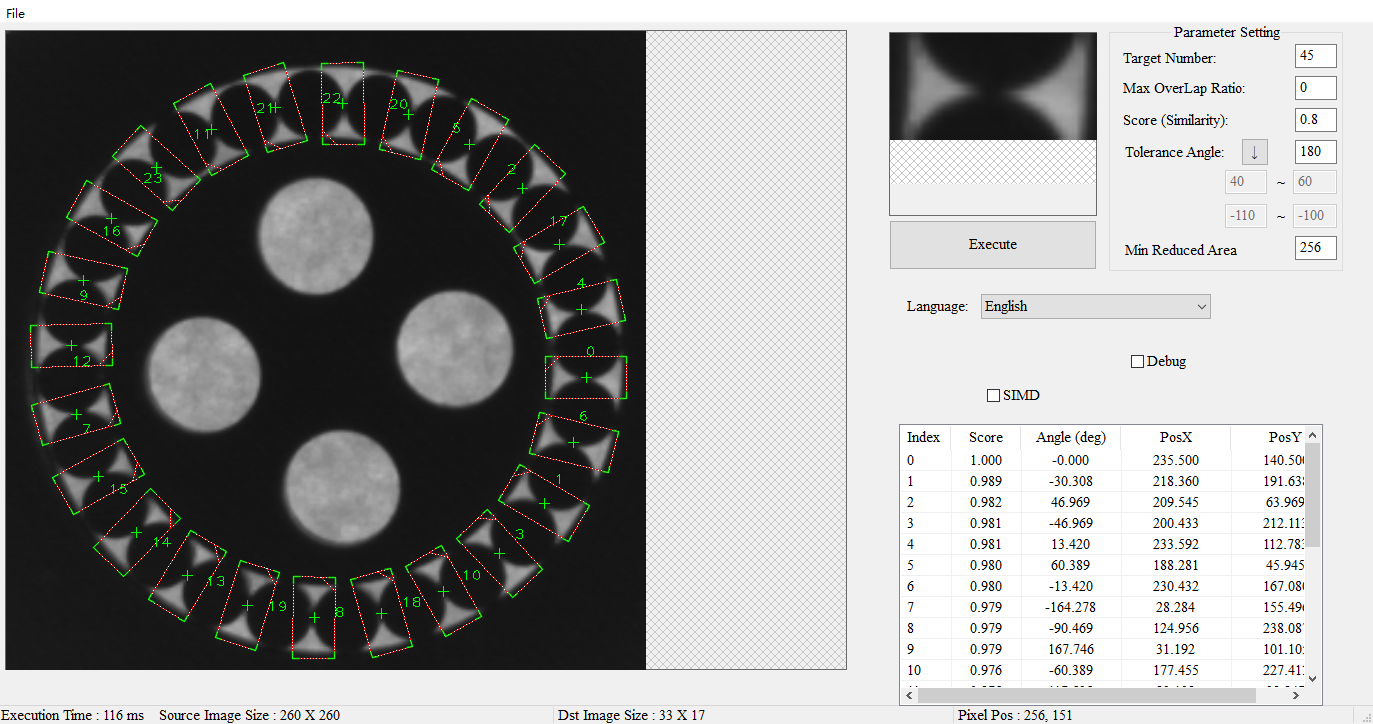
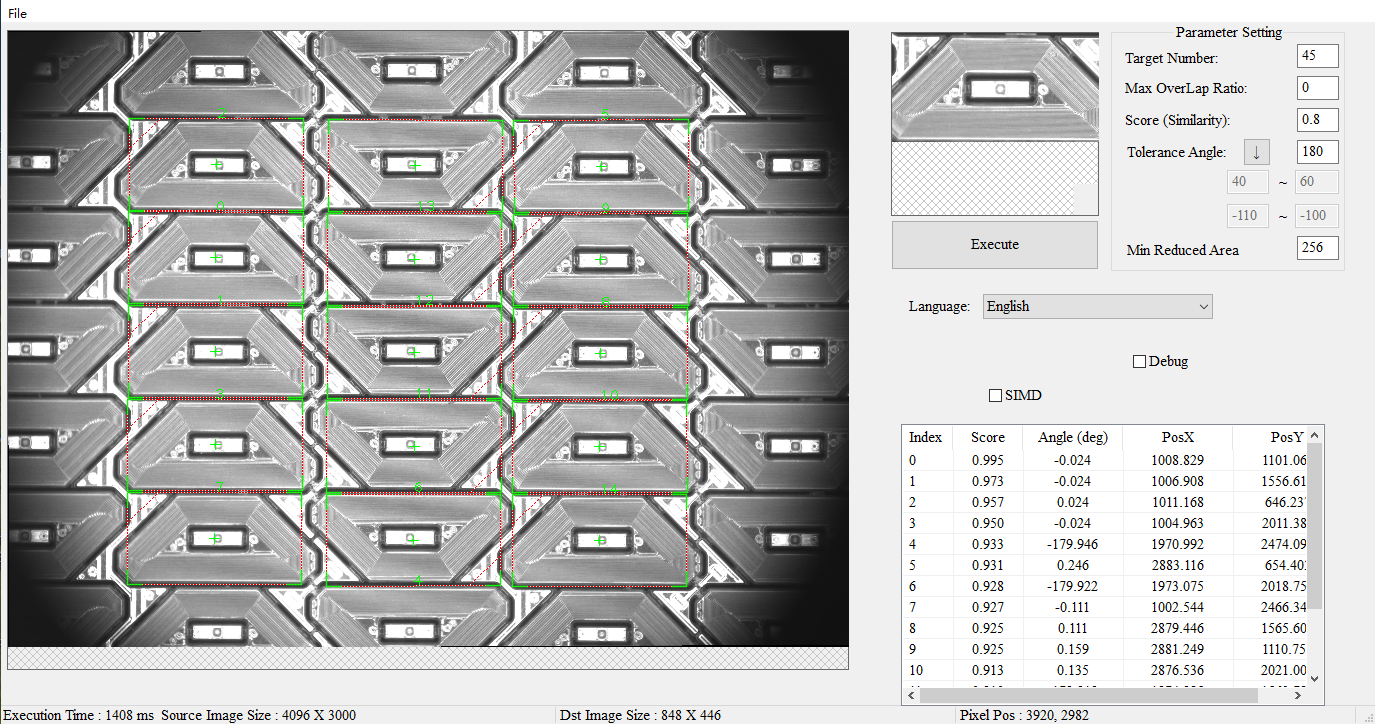
此演算法是基於Normalized Cross Correlation實現的算法,在不是太複雜的的環境下可以有效地替代ShapeBasedMatching,內部也不難理解,無SIMD,效能能夠跟上商用函示庫的相同算法,只是把OpenCV用到極限,花幾天就能讀透
github連結
執行結果示例:
The text was updated successfully, but these errors were encountered: