![]()
This is a set of example and template projects for bare-metal applications on the STM32MP15x Cortex-A7 microprocessor. I use "bare-metal" to mean no OS, so unlike most STM32MP1 or Cortex-A tutorials, there is no Linux or RTOS. Basic systems such as handling interrupts, setting up a stack, memory management, etc. are handled in these projects, as well as more advanced featues like parallel processing (multiple cores) and coprocessor control.
The target audience is the developer who is already familiar with the Cortex-M series. Rather than give a ground-up introduction to microcontrollers/processors, these projects assume you are familiar with MCUs such as the Cortex-M0/M3/M4/M7 or perhaps AVR (ATMEGA) chips. Requirements:
- You should be comfortable with the concepts of interrupts, stacks, HAL, etc.
- You should be able to build a Makefile project from the command line, or be fluent in some IDE such that you can convert a Makefile project to your preferred format.
- You should be able to understand simple C++ code, at least at a basic level.
If not, you'll need to brush up on microcontroller and command-line fundamentals before proceeding.
I am actively refining and adding new example projects to this. If you want to see something, please ask! (open a github issue)
Here's a list of the example projects:
- Minimal Boot: Hello World project to prove the bootloader and your hardware is working.
- Ctest: Demonstrates the startup code for a C/C++ project: setting up the stack, initializing globals, etc.
- Basic IRQ: Basic interrupt handling with the A7's Generic Interrupt Controller.
- Nested IRQ: More sophisticed interrupt handling: interrupts interrupting interrupts! (and using lambdas as handlers!)
- Multicore_a7: Demonstrates running both A7 cores in parallel.
- Copro_rproc: Using the rproc feature of U-Boot to load and run firmware on the M4 core in parallel with the A7 core.
- Copro_embedded: Embedding the M4 firmware binary into the A7's firmware binary, and loading it on demand. Wacky, but cool.
- Audio Processor: A fun practical project that lets you select one of several audio synths to play. Requires STM32MP1 Discovery board. Uses STM32-HAL, some DaisySP example projects, and some Faust algorithms. TODO: use multi-core A7.
- USB MSC Device: Simple example that creates a USB Mass Storage Class device (aka "USB thumb drive").
- USB MIDI Host: Demonstrates USB host functionality using a MIDI keyboard, sequencer or controller.
To run an application on the STM32MP1, a bootloader must load it. There are two bootloaders to choose from:
-
U-Boot: the standard bootloader, officially supported by ST. Lots of features and support for many platforms.
-
MP1-Boot: a lightweight, fast and minimal featured bootloader.
The STM32MP157 is a powerful chip, with two Cortex-A7 cores running at 650MHz or 800MHz, L1 and L2 caches, up to 1GB of external 533MHz RAM, a Cortex-M4 core and a suite of peripherals. The peripherals are familiar to anyone having used the STM32F7 or STM32H7 series (and sometimes STM32 HAL-based F7/H7 code can be used as-is in the MP1 A7).
Each project in the examples/ directory is meant to demonstrate a simple idea
with as few dependencies as possible. The CMSIS device header for the
STM32MP157 chip is used to access the hardware registers, and in some cases
I've written a simple driver class that lives in examples/shared/drivers/.
There also is some shared initialization code in examples/shared/system/,
such as setting up the MMU and the caches. For the most part you can use these
as-is, although you will need to modify the MMU setup if your project needs
areas of RAM to be non-cacheable in order to use a DMA, for example.
The bootloader is responsible for initializing the system and loading the application from the SD Card (or other boot medium) into RAM, and then running the application. Unlike a Cortex-M, where there is internal Flash memory to store your application, the Cortex-A series typically runs the application on an external RAM chip. The STM32MP1 has an internal ROM bootloader (called BOOTROM) which automatically copies your bootloader from the SD Card into internal SYSRAM, and then executes it. The bootloader is then responsible to enable the external RAM, and load and start the application.
The application ultimately needs to live on the SD card as well, but it can be flashed into RAM using an SWD/JTAG flasher, making debugging much easier than having to copy files to an SD card each time the code is changed.
There are two bootloader choices in this repo: U-Boot and MP1-Boot. Either one is complelely optional, however you must use one.
U-Boot is a third-party tool that is the standard bootloader supported by ST.
It's quite common to see an embedded Linux project using U-Boot. Pre-built
U-Boot images are included in this repo, so all you have to do is load them
onto an SD card and never think about it again unless you start using custom
hardware or need to change the boot command (as is optionally done in
the corpo_rproc example project).
U-Boot is a two-stage bootloader: the first stage loads the second stage, which then loads the application.
I've also provided a script to build U-Boot, too. If you're familiar with Linux kernel and device driver code, you'll notice some similarities.
U-Boot has lots of features and is quite powerful. With great power, however, comes great complexity. A more simple bootloader is also included in this repo:
MP1-Boot is a lightweight bootloader written by me. It does the minimum tasks necessary to boot an application, with no extra features. MP1-Boot is a single-stage bootloader.
You need:
- Any STM32MP15x Discovery board, or an OSD32MP1-BRK board
- A computer with the
arm-none-eabi-gcc
toolchain installed (v8 or later)
- See Setup for details on installing the required software on your computer.
- Various common USB cables, depending on which board you select
- A micro SD card
- A USB-to-serial cable (only if you use the OSD32 board) such as the FTDI cable
- Optionally, a J-Link or ST-LINK debugger (only if you use the OSD32 board -- the Discovery board has an ST-LINK on-board)
 STM32MP157A-DK1 Discovery board
STM32MP157A-DK1 Discovery board
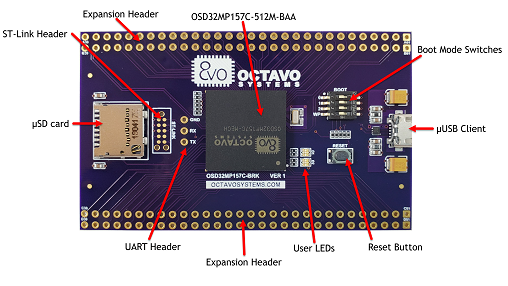
Octavo OSD32MP1-BRK board
These projects will build and run on any of the STM32MP15x Discovery boards, or the OSD32MP1-BRK board. The OSD32MP1-BRK is simply a breakout board for the OSD32MP15x SiP, which is an STM32MP157 chip plus DDR3 RAM and PMIC and other stuff in a BGA package. These example projects work the same on either board (you may need to select your board type at the top of main.cc). Each board requires a bootloader compiled for it.
The Discovery boards have a built-in USB/UART and a built-in ST-LINK, so you just need a USB cable to debug and view UART output on the console. However, AFAIK you can only use gdb to debug (not JLinkGdbServer/Ozone or TRACE32) since there is no direct access to the SWD or JTAG pins (not even a good place to solder some on). These boards also have a lot more external hardware on the PCB (codec, buttons, ethernet jack, HDMI, an option for a DSI screen,...), but have far fewer pins brought out to headers than the OSD32MP1 board.
The OSD32MP1-BRK board has an SWD/JTAG header so you can use a programmer like the SEGGER J-Link or an ST-LINK to debug with a variety of tools (gdb/OpenOCD, Ozone, TRACE32). The board has a 10 exposed pads designed to fit a 10-pin pogo adaptor, such as this one from Tag-Connect or Digikey. While you're shopping, pick up these helpful accessories too: retaining clip , and 20-to-10-pin-adaptor.
If you use the OSD32MP1-BRK board, you'll need a USB-to-UART cable to view the UART output on the console. The OSD32 board has UART pins exposed, and you can solder 0.1" pitch header pins and connect such a cable. FTDI makes the TTL-232R-3V3, available from Digikey, or there are other options like a host adaptor such as the Binho Nova.
You also can use custom hardware, it will be as easy as creating a board configuration header file to define things like which pins the UART uses, etc. See examples of these files here and here.
Clone the repo:
git clone https://github.com/4ms/stm32mp1-baremetal
On macOS, if you intend to compile U-Boot, you may need to install gsed and set
your PATH to use it instead of sed. This is only needed for building U-Boot.
See Caveats section in brew info gnu-sed for details.
# MacOS only, if you intend to build U-Boot:
brew install gnu-sed
export PATH="/usr/local/opt/gnu-sed/libexec/gnubin:$PATH"` ##or add it to your .zshrc/.bashrc
I've added some pre-built images for U-Boot, so you can get up and running more quickly. If you want to use the pre-built images, skip to step 3).
If you want to compile U-Boot yourself, see the next step 2a).
If you want to use MP1-Boot, go to step 2b).
Build U-Boot using the script. The output will be in third-party/u-boot/build/:
cd stm32mp1-baremetal
scripts/build-u-boot.sh
The script will prompt you to enter the board you selected. Depending on your selection, the script will set a value for DEVICE_TREE when building U-Boot. Note: Ignore warnings about "format string is not a string literal", it happens with some arm-none-eabi-gcc versions
Verify the output files were created:
ls -l third-party/u-boot/build/u-boot-spl.stm32
ls -l third-party/u-boot/build/u-boot.img
From the mp1-boot directory, edit main.cc and uncomment the line for your board (OSD32 or STM32Disco). Then run make:
cd bootloaders/mp1-boot
vi main.cc # uncomment the correct line to select your board
make
Verify the output file:
ls -l build/fsbl.stm32
Now you need to format and partition an SD card. Insert a card and do:
scripts/partition-sdcard.sh /dev/XXX
Where /dev/XXX is the actual device name, such as /dev/sdc or /dev/disk3. Take care to get the device name right because the script will FULLY ERASE whatever device you tell it!
This script will create four partitions, and format the fourth to FAT32.
If you need to find out what the device is, you can type ls -l /dev/sd or
ls -l /dev/disk and then hit Tab. Or, on macOS you can type mount instead
of ls -l /dev/disk<TAB> Take note of what it lists. Then remove (or insert)
the SD card, and repeat the command. Whatever changed is the SD card's device
name(s). Use the base name, e.g. /dev/sdc, not /dev/sdc3.
I recommend you eject and re-insert the card at this point (you might get some cryptic errors if you don't).
Then run the script to copy the bootloader to the first two or three partitions:
# To use pre-built U-Boot images for OSD32MP1 board:
scripts/copy-bootloader.sh /dev/diskX bootloaders/u-boot-images/osd32mp1-brk/
# To use pre-built U-Boot images for STM32MP157A-DK1 Discovery board:
scripts/copy-bootloader.sh /dev/diskX bootloaders/u-boot-images/stm32mp157a-dk1-disco/
# To use U-Boot images that you built yourself:
scripts/copy-bootloader.sh /dev/diskX third-party/u-boot/build/
# To use MP1-Boot:
cd bootloaders/mp1-boot
make load SD_DISK_DEV=/dev/diskX
# Where /dev/diskX is something like /dev/disk2 or /dev/sdc1
This is a good moment to test your hardware setup. You can skip this step if you've done this before. Remove the SD card from the computer and insert into the OSD32 or STM32MP1 Discovery board. Attach a USB-to-UART device to the UART pins on the OSD32 board, or a micro-USB cable to the Discovery board's ST-LINK jack. Start a terminal session that connects to the USB driver (I use minicom; there are many fine alternatives). The baud rate is 115200, 8N1 (which you might have to set up, so read the minicom help file if you don't know how).
Example:
minicom -D /dev/cu.usbmodemXXXXX
Insert the card into the board and power it on. You should see boot messages, and then finally an error when it can't find the application. Now it's time to build that file.
cd examples/minimal_boot
make
ls -l build/main.elf
ls -l build/a7-main.uimg
You should see the elf and the uimg files. Each of these is the compiled
application, and either one must be loaded into DDR RAM at 0xC2000040. There
are two ways to load the application to RAM. One way is to load the elf
file by using a debugger/programmer (ST-LINK or J-Link). The other way is to
copy the uimg file to the SD card. With U-Boot, it gets copied to the fourth
partition the same way you would copy any file with your OS. With MP1-Boot,
it gets copied to the third paritition the same way we copied to bootloaders
to the SD Card (using dd).
The direct loading with a debugger method requires a debugger to be attached, and the code will not persist after power down. However, it's much more convenient so it's preferred for Debug builds. That said, not everything gets reset/cleared when you do it this way, so sometimes you need to do a cold boot and run your firmware from the SD card.
With the copy-to-SD-card method, the application firmware is stored on the SD card, so this is the method for production or long-term testing. With this method, the bootloader will automatically load the application into 0xC2000040 on boot.
I recommend using the copy-to-SD-card method for your first try, since it's more robust and has fewer moving parts (no debugger or host computer software).
There are two ways to do this if you have U-Boot, and one way if you have MP1-Boot:
Physically remove the SD card from the OSD32 or Discovery board and insert it into your computer. Then do:
cp build/a7-main.uimg /Volumes/BAREAPP/
Of course, adjust the command above to use the actual path to the mounted SD card. Or you can use drag-and-drop within your OS's GUI.
The more convenient way (if it works) is to use the USB gadget function. If you have the UART and USB cable connected (and your particular OS happens to be compatible with usb-gadget) then you might be able to mount the SD card directly over the USB connection without having to physically touch the card. It works for me on macOS and an Ubuntu box, but YMMV.
Do this:
- When the board is booting, up look for the message
Hit any key to stop autoboot, and press a key. - You will see a UBOOT> prompt. Type the command:
ums 0 mmc 0 - In another terminal window, look to see that there's a new device, e.g. /dev/sdX or /dev/disk#. The 4th partition might automatically mount on your computer, if not you can mount it manually.
Copy it like a normal file to a normal USB stick:
cp build/a7-main.uimg /Volumes/BAREAPP/
Of course, adjust the command above to use the actual path to the mounted SD card. Or you can use drag-and-drop within your OS's GUI.
If your OS didn't automatically mount the drive, do: sudo mount -o user /dev/sdX /tmp/sdcard_root or use some other path where you mount things. Then
copy the file as above.
Make sure the file is named a7-main.uimg on the SD card. U-Boot looks for a
file with this exact name, in the root dir of a FAT32 filesystem on partition
4.
There's also a script to copy the file. Really, it's worthless except it shows you the before/after file sizes:
../../scripts/copy-app-to-sdcard.sh build/a7-main.uimg /Volumes/BAREAPP/
The example projects have a make install target, so you can just type that.
The path to the SD card is hard-coded into the Makefile, so you can either edit
examples/shared/makefile-common.mk or do this:
SDCARD_MOUNT_PATH=/path/to/SDCARD make install
For MP1-Boot, insert the SD Card into your computer and run this command:
sudo dd if=path/to/app/a7-main.uimg of=/dev/diskX3
where /dev/diskX3 is the 3rd partition, like /dev/disk4s3 or /dev/sdb3
Or from the project directory, you can use the make install-mp1-boot target:
SD_DISK_DEV=/dev/diskX3 make install-mp1-boot
This is completely optional, but is very convenient when developing. You must have a working bootloader (at least SPL) which is responsible for initializing the DDR3 RAM. Once that's established, you can use a J-Link or ST-LINK programmer as well as debugger software on your host computer to load a new application image into RAM and debug it.
This README isn't a tutorial on using gdb or debuggers or SEGGER Ozone and J-Link, so I won't go into detail here. I experience some quirks and odd behavior, which is common when debugging remote targets with software from SEGGER, or OpenOCD. The process is no different than debugging on any other STM32 device: you have an elf file and you use gdb (or Ozone or TRACE32) to load it and then set breakpoints, step through code, inspect variables and memory, etc.
This requires an SWD connection, which is only found on the OSD32MP1-BRK board. It also requires a J-Link debugger. Within Ozone, create a new project for the STM32MP15xx Core A7, and load the elf file created back in step 4. You can load a new elf file after re-compiling, and debug as normal.
With TRACE32, the process is similar (Lauterbach supplies some helper scripts).
I found that often the unit requires a hard reset before I can load new firmware.
My recommendation is to have an SD Card with the U-Boot and the minimal_boot
application loaded on it. Press the reset button on the board and wait until
the UART console shows that it's done booting. At this point, you can use Ozone
or TRACE32 to load new firmware.
An even more streamlined technique is to omit U-Boot proper entirely and just load U-Boot SPL onto partitions 1 and 2 of the SD Card. Leave partitions 3 and 4 empty. The unit will boot up and quickly display "Trying to boot from MMC1" and then hang. At this point, you can load the elf file with your debugging software. The reason this works is that SPL initializes the DDR3 RAM, which is all we need to copy our firmware onto the board.
If you use OpenOCD with a USB cable connected to the ST-LINK micro-USB jack of the Discovery board, run this command in one terminal window:
openocd -f board/stm32mp15x_dk2.cfg
Alternatively, you can run JLinkGDBServer and then select the STM32MP15x Core A7 as the target.
In another terminal window, run this command (from the project directory):
arm-none-eabi-gdb -f build/main.elf
From the gdb prompt, type:
target extended-remote localhost:3333
load
The port number (3333) may be different for you, check the output of openocd or JLinkGDBServer to see what port it's listening on. There may be a different port for each core.
Remember, any file you load using a debugger will only get loaded into RAM. As soon as you power down, it will be lost.
The ARM Cortex-A Programmer's Guide. Don't expect anything to make sense until you at least skim this!
Bare-metal ARM E-book Very helpful, well written and easy to read. Geared for a different platform, but valuable information. The Ctest and Minimal Boot projects are loosely based on this. U-Boot is also used here.
There are plenty of resources for using a Cortex-A with Linux. Why am I using it for a bare-metal project? The answer is simple: real-time audio processing. Lots of fast RAM and two fast processors (plus an M4 coprocessor) make this a great platform for real-time processing.
Everything I've read about Cortex-A series chips say they're not for real-time systems. Why not? I wanted to find out... And what I've discovered is that they can be used for real-time systems! Interrupt response is a little slower (in the order of 100's of nanoseconds slower) but that's made up for by all the other speed improvements (cache, faster RAM, faster clock speed), and the M4 coprocessor is there if you really do need those few 100ns.
Of course you don't get all the awesome benefits of having Linux. But many embedded applications don't need Linux. If you just need raw processing power and fast RAM and caches, then hopefully these example projects can be a good foundation for your first Cortex-A bare-metal project.
Or, if you're writing your own OS or RTOS, or porting an existing framework such as Zephyr or FreeRTOS to the STM32MP1, then hopefully this project will be of some assistance (please let me know about it, if you do port a RTOS or custom OS!).
The STM32MP157 is a powerful chip, with two Cortex-A7 cores running at 650MHz or 800MHz, L1 and L2 caches, up to 1GB of 533MHz RAM, a Cortex-M4 core and a suite of peripherals. There's a large gap between this and the next chip down in ST's lineup: the STM32H755, which has two cores (480MHz M7 + 240MHz M4) but can only use SDRAM at 143MHz, which can be painfully slow for algorithms that perform a lot of reads and writes to memory (e.g. reverb).
The peripherals on the STM32MP1 are often identical to the peripherals on ST's Cortex-M7 chips such as the STM32H750 or H743. That means once you have the basic bare-metal framework up and running on the Cortex-A7, you may be able to just run your M7 project and all the I2C, SPI, SAI, UART, GPIO, etc will "just work".
For a real-life example, I ported a very complex project (~1MSLOC) involving three SPI buses, two I2C buses, a 240x240 RGB565 display, external ADCs and DAC chips, a full-duplex 48kHz/24-bit codec, an external PWM LED driver, and a few other goodies. A few peripherals needed some minor tweaks that were well documented in the datasheet, but for the most part the project just ported over seamlessly -- with tons more free cycles for processing the audio stream!
I welcome any issues, questions, bug reports or pull requests, high-fives, or even just a "Hi I'm curious about this, kthxbye!" I've found almost no support or example projects for using this powerful chip in a baremetal (or even RTOS) context, so I'm figuring this out as I go along and would appreciate knowing if anyone else finds this interesting too!
[ ] Try TFA (trusted firmware), make sure we start app in secure mode
[ ] Try latest U-Boot from STM32MP1 Ecosystem v4.0
[ ] MMU tutorial
[ ] Split this README into logical sections. Use github wiki? github pages?