Related Research
bibtex:
@article{blochliger2017topomap,
title={Topomap: Topological Mapping and Navigation Based on Visual SLAM Maps},
author={Bl{\"o}chliger, Fabian and Fehr, Marius and Dymczyk, Marcin and Schneider, Thomas and Siegwart, Roland},
journal={arXiv preprint arXiv:1709.05533},
year={2017}
}Video:

bibtex:
@inproceedings{fankhauser2016collaborative,
title={Collaborative navigation for flying and walking robots},
author={Fankhauser, P{\'e}ter and Bloesch, Michael and Kr{\"u}si, Philipp and Diethelm, Remo and Wermelinger, Martin and Schneider, Thomas and Dymczyk, Marcin and Hutter, Marco and Siegwart, Roland},
booktitle={Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on},
pages={2859--2866},
year={2016},
organization={IEEE}
}Video:

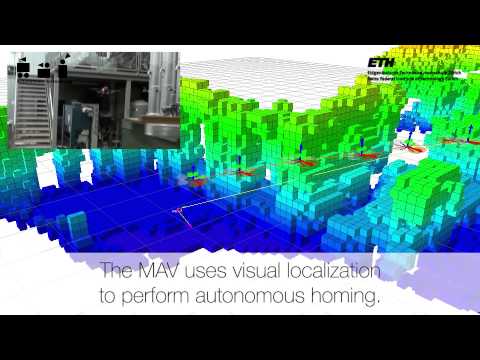
Real-time visual-inertial mapping, re-localization and planning onboard mavs in unknown environments
bibtex:
@inproceedings{burri2015real,
title={Real-time visual-inertial mapping, re-localization and planning onboard mavs in unknown environments},
author={Burri, Michael and Oleynikova, Helen and Achtelik, Markus W and Siegwart, Roland},
booktitle={Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on},
pages={1872--1878},
year={2015},
organization={IEEE}
}Video:
bibtex:
@inproceedings{burki2016appearance,
title={Appearance-based landmark selection for efficient long-term visual localization},
author={B{\"u}rki, Mathias and Gilitschenski, Igor and Stumm, Elena and Siegwart, Roland and Nieto, Juan},
booktitle={Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on},
pages={4137--4143},
year={2016},
organization={IEEE}
}Video:

bibtex:
@inproceedings{fehr2016reshaping,
title={Reshaping our model of the world over time},
author={Fehr, Marius and Dymczyk, Marcin and Lynen, Simon and Siegwart, Roland},
booktitle={Robotics and Automation (ICRA), 2016 IEEE International Conference on},
pages={2449--2455},
year={2016},
organization={IEEE}
}
Video:

bibtex:
@inproceedings{dymczyk2015keep,
title={Keep it brief: Scalable creation of compressed localization maps},
author={Dymczyk, Marcin and Lynen, Simon and Bosse, Michael and Siegwart, Roland},
booktitle={Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on},
pages={2536--2542},
year={2015},
organization={IEEE}
}Video:
bibtex:
@inproceedings{dymczyk2015gist,
title={The gist of maps-summarizing experience for lifelong localization},
author={Dymczyk, Marcin and Lynen, Simon and Cieslewski, Titus and Bosse, Michael and Siegwart, Roland and Furgale, Paul},
booktitle={Robotics and Automation (ICRA), 2015 IEEE International Conference on},
pages={2767--2773},
year={2015},
organization={IEEE}
}Video:
bibtex:
@inproceedings{oleynikova2015real,
title={Real-time visual-inertial localization for aerial and ground robots},
author={Oleynikova, Helen and Burri, Michael and Lynen, Simon and Siegwart, Roland},
booktitle={Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on},
pages={3079--3085},
year={2015},
organization={IEEE}
}Video:

bibtex:
@inproceedings{cieslewski2015map,
title={Map API-scalable decentralized map building for robots},
author={Cieslewski, Titus and Lynen, Simon and Dymczyk, Marcin and Magnenat, St{\'e}phane and Siegwart, Roland},
booktitle={Robotics and Automation (ICRA), 2015 IEEE International Conference on},
pages={6241--6247},
year={2015},
organization={IEEE}
}Video:
Monocular Visual-Inertial SLAM for Fixed-Wing UAVs Using Sliding Window Based Nonlinear Optimization
bibtex:
@inproceedings{hinzmann2016monocular,
title={Monocular Visual-Inertial SLAM for Fixed-Wing UAVs Using Sliding Window Based Nonlinear Optimization},
author={Hinzmann, Timo and Schneider, Thomas and Dymczyk, Marcin and Schaffner, Andreas and Lynen, Simon and Siegwart, Roland and Gilitschenski, Igor},
booktitle={International Symposium on Visual Computing},
pages={569--581},
year={2016},
organization={Springer}
}bibtex:
@inproceedings{dymczyk2016map,
title={Map Summarization for Tractable Lifelong Mapping},
author={Dymczyk, Marcin and Gilitschenski, Igor and Siegwart, Roland and Stumm, Elena},
booktitle={RSS Workshop on Geometry and beyond, Vol. To Appear, 2016},
year={2016}
}bibtex:
@inproceedings{hinzmann2016robust,
title={Robust map generation for fixed-wing UAVs with low-cost highly-oblique monocular cameras},
author={Hinzmann, Timo and Schneider, Thomas and Dymczyk, Marcin and Melzer, Amir and Mantel, Thomas and Siegwart, Roland and Gilitschenski, Igor},
booktitle={Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on},
pages={3261--3268},
year={2016},
organization={IEEE}
}bibtex:
@inproceedings{dymczyk2016erasing,
title={Erasing bad memories: Agent-side summarization for long-term mapping},
author={Dymczyk, Marcin and Schneider, Thomas and Gilitschenski, Igor and Siegwart, Roland and Stumm, Elena},
booktitle={Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on},
pages={4572--4579},
year={2016},
organization={IEEE}
}bibtex:
@inproceedings{merzic2017map,
title={Map quality evaluation for visual localization},
author={Merzi{\'c}, Hamza and Stumm, Elena and Dymczyk, Marcin and Siegwart, Roland and Gilitschenski, Igor},
booktitle={Robotics and Automation (ICRA), 2017 IEEE International Conference on},
pages={3200--3206},
year={2017},
organization={IEEE}
}bibtex:
@inproceedings{gehrig2017visual,
title={Visual place recognition with probabilistic voting},
author={Gehrig, Mathias and Stumm, Elena and Hinzmann, Timo and Siegwart, Roland},
booktitle={Robotics and Automation (ICRA), 2017 IEEE International Conference on},
pages={3192--3199},
year={2017},
organization={IEEE}
}The following list contains a list of paper on which specific components of maplab are built on:
- Localization:
@inproceedings{lynen2015get, title={Get Out of My Lab: Large-scale, Real-Time Visual-Inertial Localization.}, author={Lynen, Simon and Sattler, Torsten and Bosse, Michael and Hesch, Joel A and Pollefeys, Marc and Siegwart, Roland}, booktitle={Robotics: Science and Systems}, year={2015} }
- 3D reconstruction using the PMVS/CMVS exporter:
@inproceedings{furukawa2010towards, title={Towards internet-scale multi-view stereo}, author={Furukawa, Yasutaka and Curless, Brian and Seitz, Steven M and Szeliski, Richard}, booktitle={Computer Vision and Pattern Recognition (CVPR), 2010 IEEE Conference on}, pages={1434--1441}, year={2010}, organization={IEEE} } - ROVIOLI which is composed of ROVIO + maplab for map building and localization:
@article{bloesch2017iterated, title={Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback}, author={Bloesch, Michael and Burri, Michael and Omari, Sammy and Hutter, Marco and Siegwart, Roland}, journal={The International Journal of Robotics Research}, volume={36}, number={10}, pages={1053--1072}, year={2017}, publisher={SAGE Publications Sage UK: London, England} }